Difference between revisions of "2009 Summer Project Week Prostate Robotics"
| (13 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
__NOTOC__ | __NOTOC__ | ||
<gallery> | <gallery> | ||
| − | Image:PW2009-v3.png|[[2009_Summer_Project_Week| | + | Image:PW2009-v3.png|[[2009_Summer_Project_Week#Projects|Projects List]] |
| − | Image: | + | Image:OpenIGTLink_JHUProstateRobot.jpg|MRI-compatible pneumatic manipulator for needle placement |
| + | Image:OpenIGTLink_Diagram_JHURobot.png|System diagram for the MRI-guided robotic prostate intervention. | ||
Image:SummerProjectWeek2009_ZFrameScreenshot.png|Confirmation screen for Z-frame robot-to-image registration on 3D Slicer. | Image:SummerProjectWeek2009_ZFrameScreenshot.png|Confirmation screen for Z-frame robot-to-image registration on 3D Slicer. | ||
| − | |||
</gallery> | </gallery> | ||
| − | + | Information about the experiment at BWH | |
| − | + | ============================================= | |
| − | + | ||
| + | If you are interested in joining us, please do: | ||
| + | 1. Ask Noby or Junichi if you can attend. | ||
| + | 2. Be at the place around 7pm on Monday or Tuesday. The place is Brigham and Women's Hospital, 221 Longwood, Boston MA 02115. | ||
| + | Please call Junichi at 617-459-2680 at the entrance of the building. | ||
| + | http://maps.google.com/maps?f=q&source=s_q&hl=en&geocode=&q=221+Longwood+Ave,+Boston,+MA+02115&sll=37.0625,-95.677068&sspn=44.25371,54.755859&ie=UTF8&ll=42.337135,-71.103044&spn=0.020271,0.026736&z=15&iwloc=A | ||
| + | |||
| + | |||
==Key Investigators== | ==Key Investigators== | ||
| − | * BWH: Junichi Tokuda, Nobuhiko Hata | + | * BWH: Junichi Tokuda, Haiying Liu, Nobuhiko Hata, Clare Tempany |
| − | * JHU: Sam Song, Nathan Cho | + | * JHU: Sam Song, Nathan Cho, Iulian Iordachita |
* AMS: Jack Blevins, Clif Burdette | * AMS: Jack Blevins, Clif Burdette | ||
* WPI: Gregory Fischer | * WPI: Gregory Fischer | ||
| − | * Queen's: Andras Lasso | + | * Queen's: Andras Lasso, Gabor Fichtinger |
<div style="margin: 20px;"> | <div style="margin: 20px;"> | ||
| Line 30: | Line 37: | ||
<h3>Approach, Plan</h3> | <h3>Approach, Plan</h3> | ||
| − | The software system consists of three sub-components: a) control software for the needle placement robot, b) software to control a closed-bore whole body 3T MRI scanner (GE Excite HD 3T, GE Healthcare), and c) open-source surgical navigation software (3D Slicer, http://www.slicer.org/). The | + | The software system consists of three sub-components: a) control software for the needle placement robot, b) software to control a closed-bore whole body 3T MRI scanner (GE Excite HD 3T, GE Healthcare), and c) open-source surgical navigation software (3D Slicer, http://www.slicer.org/) and RadVision (AcousticMed Systems). The navigation software serves as an integrated environment for calibration, surgical planning, image guidance and device monitoring and control. The 3D Slicer communicates with the other components through Ethernet to exchange data and commands using an open network communication protocol, [[OpenIGTLink]]. |
</div> | </div> | ||
| Line 36: | Line 43: | ||
<h3>Progress</h3> | <h3>Progress</h3> | ||
| − | During IGT Workshop in 2008 (Boston, December 2008), we successfully tested communication among the navigation software (3D Slicer / RadVision), robot control software, and 3T MRI at BWH. Since then, we have been working on two tasks: improvement of the pneumatic mechanism at JHU and volunteer studies to analyze the workspace in the 3T MRI at BWH. | + | During IGT Workshop in 2008 (Boston, December 2008), we successfully tested communication among the navigation software (3D Slicer / RadVision), robot control software, and 3T MRI at BWH. Since then, we have been working primarily on two tasks: improvement of the pneumatic mechanism at JHU and volunteer studies to analyze the workspace in the 3T MRI at BWH. |
</div> | </div> | ||
</div> | </div> | ||
| + | |||
| + | <div style="width: 97%; float: left;"> | ||
| + | |||
| + | ==Logistics for MRI Experiment at Brigham and Women's Hospital== | ||
| + | *Date / place | ||
| + | **Date: 22, 23 and 25 June 2009, from 6:00pm - | ||
| + | **Place: Brigham and Women's Hospital, LMRC 3T Shortbore MRI Scanner Room, 221 Longwood Ave. Boston, MA | ||
| + | *Participants | ||
| + | **BWH: Clare, Noby, Junichi, Haiying | ||
| + | **JHU: Iulian, Sam, Nathan, | ||
| + | **AMS: Clif, Jack | ||
| + | **Queen's: Gabor | ||
| + | **WPI: Greg | ||
| + | *Note: | ||
| + | **We might not have enough room for visitors. Please ask [[User:Tokuda|Junichi Tokuda]], if you are interested in participating. | ||
| + | |||
| + | |||
| + | ==Photos== | ||
| + | [[Image:SummerProjectWeek2009_ProstateRobot1.jpg]] | ||
| + | [[Image:SummerProjectWeek2009_ProstateRobot2.jpg]] | ||
| + | [[Image:SummerProjectWeek2009_ProstateRobot3.jpg]] | ||
==References== | ==References== | ||
Latest revision as of 14:30, 26 June 2009
Home < 2009 Summer Project Week Prostate Robotics
MRI-compatible pneumatic manipulator for needle placement
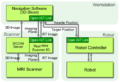
System diagram for the MRI-guided robotic prostate intervention.
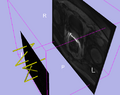
Confirmation screen for Z-frame robot-to-image registration on 3D Slicer.




Information about the experiment at BWH
=============================================
If you are interested in joining us, please do:
1. Ask Noby or Junichi if you can attend.
2. Be at the place around 7pm on Monday or Tuesday. The place is Brigham and Women's Hospital, 221 Longwood, Boston MA 02115.
Please call Junichi at 617-459-2680 at the entrance of the building.
http://maps.google.com/maps?f=q&source=s_q&hl=en&geocode=&q=221+Longwood+Ave,+Boston,+MA+02115&sll=37.0625,-95.677068&sspn=44.25371,54.755859&ie=UTF8&ll=42.337135,-71.103044&spn=0.020271,0.026736&z=15&iwloc=A
Key Investigators
- BWH: Junichi Tokuda, Haiying Liu, Nobuhiko Hata, Clare Tempany
- JHU: Sam Song, Nathan Cho, Iulian Iordachita
- AMS: Jack Blevins, Clif Burdette
- WPI: Gregory Fischer
- Queen's: Andras Lasso, Gabor Fichtinger
Objective
We will perform a mock-up procedure to validate our software / hardware system for MRI-guided transperineal prostate intervention.
Approach, Plan
The software system consists of three sub-components: a) control software for the needle placement robot, b) software to control a closed-bore whole body 3T MRI scanner (GE Excite HD 3T, GE Healthcare), and c) open-source surgical navigation software (3D Slicer, http://www.slicer.org/) and RadVision (AcousticMed Systems). The navigation software serves as an integrated environment for calibration, surgical planning, image guidance and device monitoring and control. The 3D Slicer communicates with the other components through Ethernet to exchange data and commands using an open network communication protocol, OpenIGTLink.
Progress
During IGT Workshop in 2008 (Boston, December 2008), we successfully tested communication among the navigation software (3D Slicer / RadVision), robot control software, and 3T MRI at BWH. Since then, we have been working primarily on two tasks: improvement of the pneumatic mechanism at JHU and volunteer studies to analyze the workspace in the 3T MRI at BWH.
Logistics for MRI Experiment at Brigham and Women's Hospital
- Date / place
- Date: 22, 23 and 25 June 2009, from 6:00pm -
- Place: Brigham and Women's Hospital, LMRC 3T Shortbore MRI Scanner Room, 221 Longwood Ave. Boston, MA
- Participants
- BWH: Clare, Noby, Junichi, Haiying
- JHU: Iulian, Sam, Nathan,
- AMS: Clif, Jack
- Queen's: Gabor
- WPI: Greg
- Note:
- We might not have enough room for visitors. Please ask Junichi Tokuda, if you are interested in participating.
Photos



References
- DiMaio S.P., Fischer G.S., Haker S.J., Hata N., Iordachita I., Tempany C.M., Kikinis R., Fichtinger G. A system for MRI-guided Prostate Interventions. Proceedings of IEEE RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics 2006 Feb.
- Fischer G.S., Iordachita I., Csoma C., Tokuda J., Mewes P.W., Tempany C.M., Hata N., Fichtinger G. Pneumatically Operated MRI Compatible Needle Placement Robot for Prostate Interventions. Proceedings of the IEEE International Conference on Robotics and Automation 2008;2489-2495.
- Mewes P., Tokuda J., DiMaio S., Fischer G., Csoma C., Gobbi D., Tempany C., Fichtinger G., Hata N. Integrated System for Robot-Assisted in Prostate Biopsy in Closed MRI Scanner. Proceedings of the IEEE International Conference on Robotics and Automation 2008; 2959-2962.
- Fischer G.S., Iordachita I., Csoma C., Tokuda J., DiMaio S.P., Tempany C.M., Hata N., Fichtinger G. MRI-Compatible Pneumatic Robot for Transperineal Prostate Needle Placement. IEEE/ASME Transactions on Mechatronics June 2008; 13(3):295-305.
- Tokuda J., Fischer G.S., Csoma C., DiMaio S.P., Gobbi D.G., Fichtinger G., Tempany C.M., Hata N. Software Strategy for Robotic Transperineal Prostate Therapy in Closed-Bore MRI. Int Conf Med Image Comput Comput Assist Interv. 2008;11(Pt 2):701-709. PMID: 18982666.