Difference between revisions of "Stanford Simbios group"
| Line 153: | Line 153: | ||
Image:2_MeanSliceZ.JPG | Image:2_MeanSliceZ.JPG | ||
</gallery> | </gallery> | ||
| − | + | ==Image Segmentation Methods (Oct-Dec) 2009== | |
| − | ===''' | + | ==='''Shape Dectection Level Set Approach'''=== |
We started in October with Shape Dectection Level Set algorithm. In this algorithm, the governing differential equation has an additional curvature-based term. This term acts as a smoothing term where areas of high curvature, assumed to be due to noise, | We started in October with Shape Dectection Level Set algorithm. In this algorithm, the governing differential equation has an additional curvature-based term. This term acts as a smoothing term where areas of high curvature, assumed to be due to noise, | ||
are smoothed out. Scaling parameters are used to control the tradeoff between the expansion term and the smoothing term. One consequence of this additional curvature term is that the fast marching algorithm is no longer applicable, because the contour is no longer guaranteed to always be expanding. Instead, the level set function is updated iteratively. The ShapeDetectionLevelSetImageFilter expects two inputs, the first being an initial Level Set in the form of an itk::Image, and the second being a feature image. For this algorithm, the feature image is an edge potential image that basically follows the same rules applicable to the speed image used for the FastMarchingImageFilter. The pipeline of the algorithm is as follows | are smoothed out. Scaling parameters are used to control the tradeoff between the expansion term and the smoothing term. One consequence of this additional curvature term is that the fast marching algorithm is no longer applicable, because the contour is no longer guaranteed to always be expanding. Instead, the level set function is updated iteratively. The ShapeDetectionLevelSetImageFilter expects two inputs, the first being an initial Level Set in the form of an itk::Image, and the second being a feature image. For this algorithm, the feature image is an edge potential image that basically follows the same rules applicable to the speed image used for the FastMarchingImageFilter. The pipeline of the algorithm is as follows | ||
| Line 170: | Line 170: | ||
The models extracted from the segmented label maps are as follows. | The models extracted from the segmented label maps are as follows. | ||
| − | <gallery widths="200px" perrow=" | + | <gallery widths="200px" perrow="2"> |
Image:ShapeDetectionModel.JPG | Image:ShapeDetectionModel.JPG | ||
| + | Image:ShapeDetectionModelSmoothing.JPG | ||
</gallery> | </gallery> | ||
Revision as of 21:55, 18 December 2009
Home < Stanford Simbios groupBack to NA-MIC External Collaborations
Grant#
U54EB005149-05S2
Key Personnel
- Stanford: Scott Delp, PI, Harris Doddi, Saikat Pal
- NA-MIC: Ron Kikinis, Steve Pieper
- Kitware: Luis Ibanez
Grant Duration
09/19/2008-07/31/2010



Aim
To develop a generic semi-automatic segmentation toolkit to convert images of musculoskeletal structures to 3D models.
Process Flowchart

Progress
Atlas Generation from Input MR Images
Model Generation from Input MR Images
Pre-Segmented models for femur, patella and tibia are obtained for a patient (in .stl format).
Create a filled label map using PolyDataToFilledLabelMap module in slicer
The models generated in the above step are closed but hollow. But EM Segmentation requires the atlas given to be in closed filled format. Hence we converted the hollow closed models into filled label volumes using the module PolyDataToFilledLabelMap module in Slicer. The output label map of this module is of datatype unsigned char and is converted to short datatype.



EM Segmentation based on the atlas
The output label map in the above is given as input atlas in the EM Segmentation step. As an initial step we ran EM Segmentation on the same patient. The EM Segmented output is given in the below figure.
Register Images
Register Images Module in Slicer
We are now in the process of trying to register new patient image to the existing patient image. If we register the images, we can get the transform which can be used to register the existing atlas (label map) to the new patient.
We think that Pipelined Bspline Registration may give promising results for our dataset. Below are some of the results. Here we consider 64_MRI as the fixed image and 58_MRI as the moving image and used Pipelined BSpline Image registration method for registration. Also we gave one point as landmark point.



We also tried affine registration for the above mentioned patients with 64 as fixed MRI and 58 as moving MRI and one landmark point. The zipped file which contains scene along with screenshots is File:64 58 Affine Registration.zip


We also tried BSpline registration for the above mentioned patients with 64 as fixed MRI and 58 as moving MRI and one landmark point. The zipped file which contains scene along with screenshots is
File:64 58 BSpline Registration.zip. Here we used 4 points as landmarks.


We also tried Affine registration for the above mentioned patients with 64 as fixed MRI and 58 as moving MRI and four landmark point. The zipped file which contains scene along with screenshots is
File:64 58 Affine Various Iterations.zip. Here we used 4 points as landmarks. We varied the number of iterations from 200 to 400.



Update May 13, 2009
We tried Affine registration for the above mentioned patients with 64 as fixed MRI and 58 as moving MRI and no landmark point. The zipped file which contains scene along with screenshots is File:64 58 Affine Various Iterations.zip. We varied the number of iterations from 200 to 400.
Update May 14, 2009
We tried Affine registration for the above mentioned patients with 64 as fixed MRI and 58 as moving MRI and 10 landmark point. The zipped file which contains scene along with screenshots is File:Affine Registration 10 Landmark Points Varying Iterations.zip. We varied the number of iterations from 50 to 450.
- 64 58 Affine 450 Iterations 10 Landmark Points.jpg





Update May 20, 2009
We tried BSpline registration for the above mentioned patients with 64 as fixed MRI and 58 as moving MRI and no landmark point. The zipped file which contains scene along with screenshots is File:Affine Registration 10 Landmark Points Varying Iterations.zip. We varied the number of iterations from 50 to 450.


- 64 58 BSpline 360 Iterations.JPG





Update May 21, 2009
We tried Pipelined Affine registration for the above mentioned patients with 64 as fixed MRI and 58 as moving MRI and no landmark point. The zipped file which contains scene along with screenshots is File:BSpline Registration Varying Iterations.zip. We varied the number of iterations from 50 to 450.

- 64 58 PipeLinedAffine Registration 400 Iterations.JPG





Update May 25, 2009
We tried Affine registration for the above mentioned patients with 64 as fixed MRI and 58 as moving MRI and no landmark point. The zipped file which contains scene along with screenshots is File:BSpline Registration Varying Iterations.zip. We varied the number of iterations from 50 to 5000.



Multi Image Registration
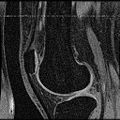
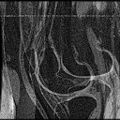
We have also tried the approach of Non-rigid Groupwise Registration using Bspline Deformation Model by Serdar K. Balci, Polina Golland and William M. Wells. In this approach, we try to give one slice each of two different patients we need to register as input. Here are some of the results of their approach.
- Slice 1:
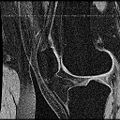
- Slice 2:
- Mean Slice of above two :



- Slice 1:
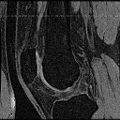
- Slice 2:

- Mean Slice of above two :



Image Segmentation Methods (Oct-Dec) 2009
Shape Dectection Level Set Approach
We started in October with Shape Dectection Level Set algorithm. In this algorithm, the governing differential equation has an additional curvature-based term. This term acts as a smoothing term where areas of high curvature, assumed to be due to noise, are smoothed out. Scaling parameters are used to control the tradeoff between the expansion term and the smoothing term. One consequence of this additional curvature term is that the fast marching algorithm is no longer applicable, because the contour is no longer guaranteed to always be expanding. Instead, the level set function is updated iteratively. The ShapeDetectionLevelSetImageFilter expects two inputs, the first being an initial Level Set in the form of an itk::Image, and the second being a feature image. For this algorithm, the feature image is an edge potential image that basically follows the same rules applicable to the speed image used for the FastMarchingImageFilter. The pipeline of the algorithm is as follows

The output of this algorithm is as follows.



The models extracted from the segmented label maps are as follows.

