Difference between revisions of "2013 Project Week:AgileMedicalRobot"
From NAMIC Wiki
| Line 40: | Line 40: | ||
* Created sequence diagram by using [http://argouml.tigris.org ArgoUML] | * Created sequence diagram by using [http://argouml.tigris.org ArgoUML] | ||
**[[Diagram revision control]]; export XMI file from ArgoUML -> repository at GitHub | **[[Diagram revision control]]; export XMI file from ArgoUML -> repository at GitHub | ||
| − | * Identified clinical workflow, system components and tasks | + | * Documented the following items to Wiki |
| − | * Identified states and information to be exchanged | + | **Identified clinical workflow, system components and tasks |
| + | **Identified states and information to be exchanged | ||
* Planned incremental development phases | * Planned incremental development phases | ||
* Designed igtlRobot (OpenIGTLink extension) based on the workflow and implemented parts of the extension message classes. | * Designed igtlRobot (OpenIGTLink extension) based on the workflow and implemented parts of the extension message classes. | ||
Revision as of 16:31, 11 January 2013
Home < 2013 Project Week:AgileMedicalRobot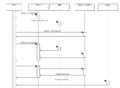
Sequence Diagram for MRI-guided liver ablation robot (the beginning part)


Key Investigators
- BWH: Atsushi Yamada, Nobuhiko Hata
- Canon: Taka Kato, Onuma
Objective
To develop a system architecture for MRI-guided liver ablation robot, and identify the critical software modules in Slicer, OpenIGTLink, NITRO
Approach, Plan
- Identify system components in the robot
- Identify workflow in the target clinical application
- List system "phases" for each workflow items
- Discuss the tasks for each components at each phase
- Identify information to be exchanged to accomplish the tasks
- Identify the information to be logged for recovery from crash and emergency stop
- Design incremental development phases with test and validation
- Identify virtual and real system components to be developed
- Identify resource sharing mechanism among component developpers
Progress
- Created the repository
- Created sequence diagram by using ArgoUML
- Diagram revision control; export XMI file from ArgoUML -> repository at GitHub
- Documented the following items to Wiki
- Identified clinical workflow, system components and tasks
- Identified states and information to be exchanged
- Planned incremental development phases
- Designed igtlRobot (OpenIGTLink extension) based on the workflow and implemented parts of the extension message classes.
- Created virtual components for Robot control unit, Slicer to perform the communication of each device by using igtlRobot.
- capable of comprehending "state" and "information to be exchanged"
Delivery Mechanism
- The documentation to be contained in NCIGT wiki site.