Difference between revisions of "2014 Project Week:PercutaneousApproachAnalysis"
From NAMIC Wiki
| (20 intermediate revisions by the same user not shown) | |||
| Line 4: | Line 4: | ||
Image:PathViewAyamadaAHM2014.png|Calculated Path Candidates | Image:PathViewAyamadaAHM2014.png|Calculated Path Candidates | ||
Image:ApproachImageAyamada2014.png|Module Overview | Image:ApproachImageAyamada2014.png|Module Overview | ||
| − | Image:ModulePane.png|Module | + | Image:ModulePane.png|Module Panel |
| + | Image:ExtendCandidatePath.png|YouTube: http://youtu.be/jI_4IZIT4iI | ||
</gallery> | </gallery> | ||
==Key Investigators== | ==Key Investigators== | ||
| − | *Atsushi Yamada (Shiga University of Medical Science) | + | *Atsushi Yamada (Shiga University of Medical Science, Japan, ayamada@belle.shiga-med.ac.jp) |
*Junichi Tokuda (BWH) | *Junichi Tokuda (BWH) | ||
| − | *Koichiro Murakami (Shiga University of Medical Science) | + | *Koichiro Murakami (BWH, Shiga University of Medical Science, Japan) |
| − | |||
==Project Description== | ==Project Description== | ||
| Line 24: | Line 24: | ||
<div style="width: 27%; float: left; padding-right: 3%;"> | <div style="width: 27%; float: left; padding-right: 3%;"> | ||
<h3>Approach, Plan</h3> | <h3>Approach, Plan</h3> | ||
| − | * | + | * Implement function to display maximum and minimum length paths |
| + | * Implement function to display maximum and minimum oblique paths | ||
| + | * Fix bugs | ||
</div> | </div> | ||
<div style="width: 27%; float: left; padding-right: 3%;"> | <div style="width: 27%; float: left; padding-right: 3%;"> | ||
<h3>Progress</h3> | <h3>Progress</h3> | ||
| − | * | + | * Created this page (1/6) |
| + | * Private GitHub repository: [https://github.com/ayamada0614/PercutaneousPathDesigner.git Percutaneous Path Designer module] | ||
| + | * Implemented planning part (1/6) | ||
| + | * Implemented needle path selection part (1/6) | ||
| + | * [Planning procedure] | ||
| + | ** Set a target point, obstacles, region of insertion candidate | ||
| + | ** Obtain the path candidates with visualization as sun ray | ||
| + | ** Select one path from the path candidates by using the slider interface | ||
| + | ** Find a needle insertion point obtained by extending the tip of the selected needle path candidate | ||
</div> | </div> | ||
</div> | </div> | ||
Latest revision as of 03:42, 25 July 2014
Home < 2014 Project Week:PercutaneousApproachAnalysis
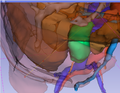
Calculated Path Candidates

Module Overview

Module Panel
YouTube: http://youtu.be/jI_4IZIT4iI





Key Investigators
- Atsushi Yamada (Shiga University of Medical Science, Japan, ayamada@belle.shiga-med.ac.jp)
- Junichi Tokuda (BWH)
- Koichiro Murakami (BWH, Shiga University of Medical Science, Japan)
Project Description
Objective
- The goals of the entire project are to display pathways to a target tumor avoiding anatomical structures including arteries and other organs and to use these pathways for planning.
- The goal of this project is to implement the function to pick up geometrically specific pathways (short distance, small oblique and so on) from calculated pathway candidates.
Approach, Plan
- Implement function to display maximum and minimum length paths
- Implement function to display maximum and minimum oblique paths
- Fix bugs
Progress
- Created this page (1/6)
- Private GitHub repository: Percutaneous Path Designer module
- Implemented planning part (1/6)
- Implemented needle path selection part (1/6)
- [Planning procedure]
- Set a target point, obstacles, region of insertion candidate
- Obtain the path candidates with visualization as sun ray
- Select one path from the path candidates by using the slider interface
- Find a needle insertion point obtained by extending the tip of the selected needle path candidate