Difference between revisions of "2016 Winter Project Week/Projects/CryoPlanningSlicerModule"
From NAMIC Wiki
| Line 35: | Line 35: | ||
*The user has the choice of three different ice probes - ice ball, ice rod and ice sphere. | *The user has the choice of three different ice probes - ice ball, ice rod and ice sphere. | ||
* Given the ice ball and the tumor model, the amount of overlap and the distance between the two models can be computed and displayed to the interventionist. | * Given the ice ball and the tumor model, the amount of overlap and the distance between the two models can be computed and displayed to the interventionist. | ||
| − | * Automatic estimation of the optimal position and orientation of the ice ball has to be | + | * Automatic estimation of the optimal position and orientation of the ice ball based on BGFS optimization algorithm has been completed. |
| + | * The parameters of the algorithm have to be optimized since the output is dependent on the choice of initial parameters | ||
|} | |} | ||
==Background and References== | ==Background and References== | ||
<!-- Use this space for information that may help people better understand your project, like links to papers, source code, or data --> | <!-- Use this space for information that may help people better understand your project, like links to papers, source code, or data --> | ||
Latest revision as of 13:38, 8 January 2016
Home < 2016 Winter Project Week < Projects < CryoPlanningSlicerModule
CryoPlanning Module GUI

Iceball and Tumor models
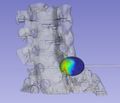
Distance model
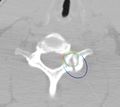
Distance labelmap





Key Investigators
- Jayender Jagadeesan, BWH
- Steve Pieper, BWH
- Sandy Wells, BWH
Project Description
| Objective | Approach and Plan | Progress and Next Steps |
|---|---|---|
|
|
|