Difference between revisions of "Summer project week 2011 Finsler Streamlines"
| Line 2: | Line 2: | ||
<gallery> | <gallery> | ||
Image:PW-SLC2011.png|[[2011_Winter_Project_Week#Projects|Projects List]] | Image:PW-SLC2011.png|[[2011_Winter_Project_Week#Projects|Projects List]] | ||
| − | Image:screen1.png | Step 1 - You can start by loading a DWI image and a mask (not necessary, but very convenient to accelerate computations). | + | Image:screen1.png | Step 1 - You can start by loading a DWI image (should be HARDI) and a mask (not necessary, but very convenient to accelerate computations). |
Image:screen2.png | Step 2 - Use the segmentation editor (or load any other label map at your convenience). This method requires target regions as well as seeding regions. | Image:screen2.png | Step 2 - Use the segmentation editor (or load any other label map at your convenience). This method requires target regions as well as seeding regions. | ||
Image:screen3.png | Step 3 - With the Finsler tractography module, generate a cost map ("Output scalar volume" in the picture) and a map of arrival directions ("Output directions volume"). | Image:screen3.png | Step 3 - With the Finsler tractography module, generate a cost map ("Output scalar volume" in the picture) and a map of arrival directions ("Output directions volume"). | ||
Latest revision as of 13:12, 24 June 2011
Home < Summer project week 2011 Finsler Streamlines
Step 1 - You can start by loading a DWI image (should be HARDI) and a mask (not necessary, but very convenient to accelerate computations).

Step 2 - Use the segmentation editor (or load any other label map at your convenience). This method requires target regions as well as seeding regions.

Step 3 - With the Finsler tractography module, generate a cost map ("Output scalar volume" in the picture) and a map of arrival directions ("Output directions volume").

Step 4 - This is how the costs map looks like. Now, you can switch to the Finsler Backtracing module using as input the costs and directions generated in Step 3. Choose a target region different from the seeding region.

Step 5 - The fiber bundles are drawn in Slicer's 3-D view.
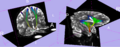
Some other examples. Fibers are always saved to disk in RAS, and colored according to the value of the Finsler cost at the points they go through.






Key Investigators
- LMI: Antonio Tristán-Vega
- LMI: Demian Wasserman
- LMI: Carl-Fredrik Westin
Objective
In the last project week we delivered an implementation of the Finsler method to compute the connectivity among regions in the white matter through High Angular Resolution Diffusion Imaging. Such method provides a costs map from a given seeding point/region to any other point within the brain. The aim in this project is tracing the minimum cost paths between two given regions in the white matter, which will in turn provide the desired streamlines.
Approach, Plan
The method is described in detail in the references below. To compute the costs map we use the Fast Sweeping algorithm: upon convergence, this method provides the minimum cost at each image voxel together with the direction such cost was reached from. Thus, the "backtracing" of these directions from a given point to the seeding point/region provides the minimum cost path.
Progress
By this time the following code available in C++/ITK:
- HARDI estimation based on Spherical Harmonics (to compute Finsler local costs).
- Parallel fast sweeping algorithm (to compute the globally optimal costs).
- Slicer module implementing the computation of the costs map and arrival directions from input DWI data [1].
- A first version of the backtracing algorithm is ready [2].
To do:
- Add testing.
Delivery Mechanism
This work will be delivered to the NA-MIC Kit as a Slicer Module
References
- Melonakos, J.; Pichon, E.; Angenent, S.; Tannenbaum, A.; "Finsler active contours." IEEE Transactions on Pattern Analysis and Machine Intelligence, 30(3): 412-423, 2008.
- Melonakos, J.; Mohan, V.; Niethammer, M.; Smith, K.; Kubicki M.; Tannenbaum, A.; "Finsler tractography for white matter connectivity analysis of the cingulum bundle", Procs. MICCAI 2007, LNCS 4791, pp. 36-43.