MRI-Guided Robot-assisted Deep Brain Stimulation Electrode PLacement
From NAMIC Wiki
Home < MRI-Guided Robot-assisted Deep Brain Stimulation Electrode PLacement

Prototype Robot
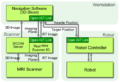
System Architecture based on CISST, Slicer and OpenIGTLInk


Key Investigators
- WPI: Gregory Fischer
- UMass: Julie Pilitsis
- Kitware: Michel Audette
Collaborators
- JHU: Peter Kazanzides
- BWH: Junichi Tokuda
Project Overview
The objective of our research is to make conventional diagnostic closed high-field MRI scanners available for guiding deep brain stimulation electrode placement interventions. Our approach is to employ an MRI-compatible robotic assistant for guiding DBS electrode insertion under direct, real-time MR image guidance. The system will allow interactive probe alignment under real-time imaging in standard diagnostic high-field MR scanners. Use of a robotic assistant will minimize the potential for human error and mis-registration associated with the current procedure and will better address the practical issues of operating in an MR scanner bore.
Objective
- TBA
Approach, Plan
- TBA
Progress
- TBA
References
- Wang Y, Cole GA, Su H, Pilitis JG, Fischer GS, MRI Compatibility Evaluation of a Piezoelectric Actuator System for a Neural Interventional Robot, 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society - EMBC 2009, Minneapolis, Minnesota, September 2009 (accepted).
- Cole G, Pilitsis J, Fischer GS, Design of a Robotic System for MRI-Guided Deep Brain Stimulation Electrode Placement, International Conference on Robotics and Automation - ICRA 2009, Kobe, Japan, May 2009.
- Wang Y, Shazeeb MS, Sotak CH, Fischer GS, Optimization of Piezoelectric Motors to Enhance MR Compatiblity for Interventional Devices, 17th Scientific Meeting and Exhibition of the International Society of Magnetic Resonance in Medicine - ISMRM 2009, April 2009.