Enhanced Neurosuregery navigation
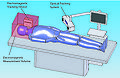
Schematic of hybrid neuronavigation system combining Brainlab, Aurora tracking and 3D Slicer.


Key Investigators
- BWH: Haytham Elhawary, Nobuhiko Hata, Alexandra J. Golby, Isaiah Norton, Haiying Liu
Objective
We are developing a hybrid neuronavigation system which combines a Brainlab navigation system with optical tracking, an Aurora electromagnetic (EM) tracking device and 3D Slicer to enhance current neurosurgical practice. We will add micro EM sensors to neurosurgical tools in order to track their tip location and integrate position and orientation into a 3D Slicer navigation environment.
Approach, Plan
Our approach is to use Brainlab to perform patient to image registration and patient tracking, and to use the Aurora device to track the tip location of the tools. OpenIGTLink will be used to interface patient images and tracking data into 3D Slicer<foo>.
Progress
This work has been granted funding by CIMIT and is scheduled to be completed in 2010. Talked to Brainlab to set up a lab based hybrid optical EM tracking system to experiments. Started Slicer3 module for navigation. Got information from Georgetown and Johns Hopkins on tips to using the Aurora tracking device and assuring accurate tracking.
References
- To be updated