2010 Summer Project Week Implementing OpenCV to Slicer3 for Neuroendoscopic Surgery
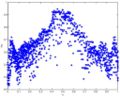
Scatter plot of the original FA data through the genu of the corpus callosum of a normal brain.
Regression of FA data; solid line represents the mean and dotted lines the standard deviation.



Key Investigators
- Nagoya Institute of Technology: Atsushi Yamada
- BWH: Nobuhiko Hata, Junichi Tokuda
- Acknowledgement: K. Chinzei (AIST), Y. Hayashi (Nagoya Univ.), M. Komura (Nagoya Institute of Technology), J. Hong (Kyushu Univ.), S.M.Kim, Wang, S. Joung (Univ. of Tokyo), T. Takeuchi (SFC Corp.), H. Liu (BWH), and H. Fujimoto (Nnagoya Institute of Technology).
Objective
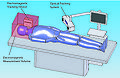
The main goal of the OpenCV for nueroendoscopic surgery project is to provide a view of the video image as a secondary window of Slicer3 for surgeon as a robot operator. The secondary window can also provide overlaid volume data on the captured video image and it will be for stereo camera.
Approach, Plan
First, we calculate a camera calibration matrix and a compensation vector for lens distortion as XML files by utilizing StereoCalib module. The module is for single/stereo camera. In this module, especially for stereo camera, we will develop three types of the secondary window for some uses. These types will be changed dinamically.
Second, we apply these matrices and vectors to SecondaryWindowWithOpenCV module for video overlay. SInce this module is for single camera, we will extend it for stereo camera.
Progress