Difference between revisions of "Projects:TubularSurfaceSegmentation"
| (3 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
| − | Back to [[NA-MIC_Internal_Collaborations:StructuralImageAnalysis|NA-MIC Collaborations]], [[Algorithm: | + | Back to [[NA-MIC_Internal_Collaborations:StructuralImageAnalysis|NA-MIC Collaborations]], [[Algorithm:Stony Brook|Stony Brook University Algorithms]], [[Engineering:Kitware|Kitware Engineering]] |
__NOTOC__ | __NOTOC__ | ||
= Tubular Surface Segmentation Framework = | = Tubular Surface Segmentation Framework = | ||
| Line 7: | Line 7: | ||
= Description = | = Description = | ||
| − | We have proposed a new model for tubular surfaces that represents a tubular surface as a center-line with a radius function associated with every point of the center-line. This transforms the problem of detecting a surface in 3D space, to detecting a curve in 4D space. Besides allowing us to impose a "soft" tubular shape prior, this also leads to computational efficiency over conventional surface segmentation approaches. We have also developed the moving end points implementation of this framework wherein the required input is only a few points in the interior of the structure of interest. This yields the additional advantage that the framework | + | We have proposed a new model for tubular surfaces that represents a tubular surface as a center-line with a radius function associated with every point of the center-line. This transforms the problem of detecting a surface in 3D space, to detecting a curve in 4D space. Besides allowing us to impose a "soft" tubular shape prior, this also leads to computational efficiency over conventional surface segmentation approaches. We have also developed the moving end points implementation of this framework wherein the required input is only a few points in the interior of the structure of interest. This yields the additional advantage that the framework simultaneously returns both the 3D segmentation and the 3D skeleton of the structure eliminating the need for a priori knowledge of end points, and an expensive skeletonization step. The framework is applicable to different tubular anatomical structures in the body. We have so far applied it successfully to the Cingulum Bundle, and blood vessels. |
== Some Results == | == Some Results == | ||
| − | + | <gallery widths="150px" perrow="5" > | |
| − | + | Image:GTTubSurfaceSeg-Img1.png|3D visualization of CB segmentation | |
| − | + | Image:GTTubSurfaceSeg-Slice_Img1.png |Slice-wise view of CB Segmentation result | |
| − | + | Image:GTTubSurfaceSeg-Slice_Img2.png |Slice-wise view of CB Segmentation result | |
| − | + | Image:GT-VesselSegByTubSeg-ResultIn3D-1.jpg | View of vessel segmentation result: initial volume (blue), segmentation result (red), extracted center-line (green) | |
| + | Image:GT-VesselSegByTubSeg-ResultSliceView-1.jpg |Slice-wise view of vessel segmentation result: segmentation result (green) and extracted center-line (red) superimposed on CTA image data | ||
| + | </gallery> | ||
== Project Status == | == Project Status == | ||
| Line 26: | Line 28: | ||
= Publications = | = Publications = | ||
| − | + | ||
| − | * [http://www.na-mic.org/publications/pages/display?search=Projects%3ATubularSurfaceSegmentation | + | * [http://www.na-mic.org/publications/pages/display?search=Projects%3ATubularSurfaceSegmentation NA-MIC Publications Database content on tubular surface segmentation] |
''In Press'' | ''In Press'' | ||
| Line 33: | Line 35: | ||
| − | + | Project Week Results: [[2009_Summer_Project_Week_TubularSurfaceSeg|June 2009]] | |
[[Category: Segmentation]] [[Category:MRI]] [[Category:Slicer]] | [[Category: Segmentation]] [[Category:MRI]] [[Category:Slicer]] | ||
Latest revision as of 01:02, 16 November 2013
Home < Projects:TubularSurfaceSegmentationBack to NA-MIC Collaborations, Stony Brook University Algorithms, Kitware Engineering
Tubular Surface Segmentation Framework
This is a new model for tubular surfaces that transforms the problem of detecting a surface in 3D space, to detecting a curve in 4D space. This model affords computation efficiency and stability (by the use of the Sobolev norm) and we have successfully tested its application in segmenting the Cingulum Bundle from DW-MRI of the brain as well as vessel segmentation from CT cardiac data.
Description
We have proposed a new model for tubular surfaces that represents a tubular surface as a center-line with a radius function associated with every point of the center-line. This transforms the problem of detecting a surface in 3D space, to detecting a curve in 4D space. Besides allowing us to impose a "soft" tubular shape prior, this also leads to computational efficiency over conventional surface segmentation approaches. We have also developed the moving end points implementation of this framework wherein the required input is only a few points in the interior of the structure of interest. This yields the additional advantage that the framework simultaneously returns both the 3D segmentation and the 3D skeleton of the structure eliminating the need for a priori knowledge of end points, and an expensive skeletonization step. The framework is applicable to different tubular anatomical structures in the body. We have so far applied it successfully to the Cingulum Bundle, and blood vessels.
Some Results
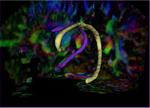
3D visualization of CB segmentation
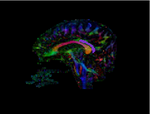
Slice-wise view of CB Segmentation result

Slice-wise view of CB Segmentation result

View of vessel segmentation result: initial volume (blue), segmentation result (red), extracted center-line (green)
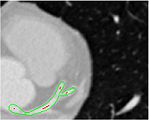
Slice-wise view of vessel segmentation result: segmentation result (green) and extracted center-line (red) superimposed on CTA image data





Project Status
- Algorithm successfully implemented and tested in MATLAB for Cingulum Bundle (as well as vessel segmentation).
Key Investigators
- Georgia Tech Algorithms: Vandana Mohan, Allen Tannenbaum
- Kitware Engineering: Luis Ibanez
Publications
In Press
- Mohan V., Sundaramoorthi G., Tannenbaum A. Tubular Surface Segmentation for Extracting Anatomical Structures from Medical Imagery. IEEE Transactions in Medical Imaging (in review). IEEE Transactions on Medical Imaging (2010) (see here).
Project Week Results: June 2009